
Նոր արհեստական մկաններ՝ ավելի թեթև, անվտանգ և ամուր ռոբոտներ
Ցյուրիխի պոլիտեխնիկում ուսումնասիրություններից՝ տեխնոլոգիա մկանային խմբերի համար, որոնք ավելի նման են մարդկանց և զգայուն են շրջակա միջավայրի հետ փոխազդեցության հարցում։
Ցյուրիխի ETH-ի հետազոտողները վերջերս մշակել են արհեստական մկաններ ռոբոտների շարժման համար, սակայն դրանց լուծումն առաջարկում է մի քանի առավելություն նախկինում տեսած տեխնոլոգիաների համեմատ:
Արժանի հետագա ուսումնասիրության, այն կարող է օգտագործվել բոլոր այն դեպքերում, երբ ռոբոտները պետք է լինեն փափուկ, այլ ոչ թե կոշտ կամ պետք է ավելի զգայուն լինեն շրջակա միջավայրի հետ շփվելու համար:
Շատ ռոբոտիստներ երազում են ռոբոտներ կառուցել, որոնք ոչ միայն մետաղի կամ այլ կոշտ նյութերի և շարժիչների համակցություն են, այլ նաև ավելի փափուկ և հարմարվող:
«Փափուկ» ավտոմատները կարող են բոլորովին այլ կերպ փոխազդել շրջակա միջավայրի հետ. օրինակ, նրանք կարող են մեղմել ցնցումները, ինչպես դա անում են մարդու վերջույթները կամ նրբորեն բռնել առարկան:
Սա նաև առավելություններ կառաջարկի էներգիայի սպառման հարցում. այսօր ռոբոտների տեղաշարժը սովորաբար շատ էներգիա է պահանջում դիրքը երկար ժամանակ պահպանելու համար, մինչդեռ փափուկ համակարգերը կարող են ավելի լավ պահել այն:
Այսպիսով, ի՞նչը կարող է ավելի ակնհայտ լինել, քան մարդկային մկանները որպես մոդել վերցնել և փորձել վերստեղծել այն:
Ցտեսություն, NCCR Robotics. Տասներկու լրիվ տարի Շվեյցարիայի ծառայության մեջ
Անօդաչու թռչող սարք կա, որը «մագլցում» է ծառերի վրա՝ դրանք պաշտպանելու համար

Յուրաքանչյուր բնական մկան նույնպես կծկվում է՝ ի պատասխան բավարար էլեկտրական իմպուլսի
Արհեստական մկանների աշխատանքը պարտադիր կերպով հիմնված է կենսաբանության վրա։
Ինչպես իրենց բնական նմանակները, արհեստական մկանները կծկվում են՝ ի պատասխան էլեկտրական իմպուլսի:
Սակայն արհեստական մկանները բաղկացած են ոչ թե բջիջներից ու մանրաթելերից, այլ հեղուկով (սովորաբար յուղով) լցված պարկից, որի պատյանը մասամբ ծածկված է էլեկտրոդներով։
Երբ այս էլեկտրոդները ստանում են էլեկտրական լարում, նրանք միանում են և հեղուկը մղում մնացած պարկի մեջ, որը ճկվում է և, հետևաբար, կարողանում է բարձրացնել քաշը:
Մեկ պարկը նման է մկանային մանրաթելերի կարճ փաթեթին:
Այս պայուսակներից մի քանիսը կարող են միանալ իրար՝ ձևավորելով շարժիչի ամբողջական տարր, որը նաև կոչվում է շարժիչ կամ ավելի պարզ՝ արհեստական մկան։
Մրցանակ ProteusDrone-ին՝ մուտանտի ձևերով փափուկ ռոբոտին
Ռոբոտ շուն. շվեյցարական գյուտը ոգեշնչված կենդանիների կենսաբանությամբ
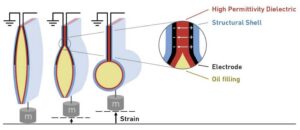
(Նկարազարդում. Gravert et al/Science/ETH Zurich)
Սկզբնապես էլեկտրաստատիկ շարժիչները պահանջում էին 6.000-ից 10.000 վոլտ լարում
Արհեստական մկանների ստեղծման գաղափարը նոր չէ, բայց մինչ այժմ դրանց իրականացման համար եղել է մի լուրջ խոչընդոտ՝ էլեկտրաստատիկ ակտուատորներն աշխատում էին միայն չափազանց բարձր լարման դեպքում՝ մոտ 6.000-ից մինչև 10.000 վոլտ:
Այս պահանջը մի քանի հետևանքներ ունեցավ՝ օրինակ, մկանները պետք է միացվեին մեծ, ծանր լարման ուժեղացուցիչներին, նրանք չէին աշխատում ջրի մեջ և լիովին անվտանգ չէին մարդկանց համար։
Այժմ մշակվել է նոր լուծում Ռոբերտ ԿացշմանՑյուրիխի ETH ռոբոտաշինության պրոֆեսոր Ստեֆան-Դանիել Գրավերտի, Էլիա Վարինիի և այլ գործընկերների հետ միասին։
Նրանք հոդված են հրապարակել արհեստական մկանների իրենց տարբերակի մասին, որն իրականում մի քանի առավելություններ է տալիս՝ «Science Advances» տեղեկատվական կայքի հոդվածում:
Ստեֆան-Դանիել Գրավերտը, ով աշխատում է որպես գիտական օգնական Ռոբերտ Կացշմանի լաբորատորիայում, նախագծել է պայուսակի նոր պատյան։
Նոր անգլո-շվեյցարական հրշեջ անօդաչու թռչող սարք՝ հրշեջներին օգնելու համար
Այսպիսով, Շվեյցարիայում ռոբոտները «սովորում են» արշավի գաղտնիքները

(Լուսանկարը՝ Gravert and others, Science, 2024)
Ապագայի լուծումը. Այսօր այն գալիս է բարձր թափանցելիությամբ ֆերոէլեկտրական նյութից
Հետազոտողները նոր արհեստական մկաններն անվանում են HALVE ակտուատորներ, որտեղ HALVE նշանակում է «Հիդրավլիկ ուժեղացված ցածր լարման էլեկտրաստատիկ»:
«Մյուս ակտուատորներում էլեկտրոդները գտնվում են կեղևի արտաքին մասում: Մեր մոտ կեղևը կազմված է մի քանի շերտերից։ Մենք վերցրեցինք բարձր թափանցելիությամբ ֆերոէլեկտրական նյութ, այսինքն՝ ունակ պահելու համեմատաբար մեծ քանակությամբ էլեկտրական էներգիա, և այն միացրինք էլեկտրոդների շերտի հետ։ Այնուհետև մենք ամեն ինչ պատեցինք պոլիմերային պատյանով, որն օժտված է գերազանց մեխանիկական հատկություններով և պայուսակն ավելի կայուն է դարձնում»։նա բացատրում է.
Այս կերպ հետազոտողները կարողացան նվազեցնել պահանջվող լարումը, քանի որ ֆերոէլեկտրական նյութի շատ ավելի բարձր թույլատրելիությունը թույլ է տալիս մեծ ուժեր ձեռք բերել՝ չնայած ցածր լարմանը:
Ստեֆան-Դանիել Գրավերտը և Էլիա Վարինին ոչ միայն միասին մշակեցին HALVE ակտուատորների կեղևը, այլ նաև իրենք լաբորատորիայում կառուցեցին շարժիչները երկու հատուկ ռոբոտներում օգտագործելու համար:
Թել Ավիվում Enel լաբորատորիա է AI-ի և ռոբոտաշինության օգտագործման էներգետիկայում
Ահա թե ինչպես է Atlas ռոբոտը արդեն կարող է աշխատել և շփվել մեզ հետ
(Լուսանկարը՝ Gravert et al-ի վիդեո սքրինշոթ, Գիտություն, 2024)
Տեխնիկական «աքցանը» և «ձուկը» ցույց են տալիս, թե ինչ կարող է անել Շվեյցարիայում նախագծված մկանը
Ռոբոտի նման օրինակներից է բռնիչը, որն ունի 11 սանտիմետր բարձրություն և ունի երկու մատ:
Յուրաքանչյուր մատը շարժվում է HALVE մղիչի երեք շարքով միացված գրպաններով:
Փոքր մարտկոցի սնուցման աղբյուրը ռոբոտին 900 վոլտ է մատակարարում:
Մարտկոցը և սնուցման աղբյուրը միասին կշռում են ընդամենը 15 գրամ:
Ամբողջ տրամաչափը, ներառյալ հզորության և կառավարման էլեկտրոնիկան, կշռում է 45:
Բռնիչը կարող է բռնել հարթ պլաստիկ առարկան բավականաչափ ուժով, որպեսզի կարողանա պահել իր քաշը, երբ առարկան օդ բարձրացվի պարանով:
«Այս օրինակը հիանալի կերպով ցույց է տալիս, թե որքան փոքր, թեթև և արդյունավետ են HALVE մղիչները: Դա նաև նշանակում է, որ մենք հսկայական քայլ ենք կատարել դեպի մեր նպատակը՝ ստեղծելու մկանների վրա հիմնված ինտեգրված համակարգեր»:,- գոհունակությամբ ասում է Կացշմանը։
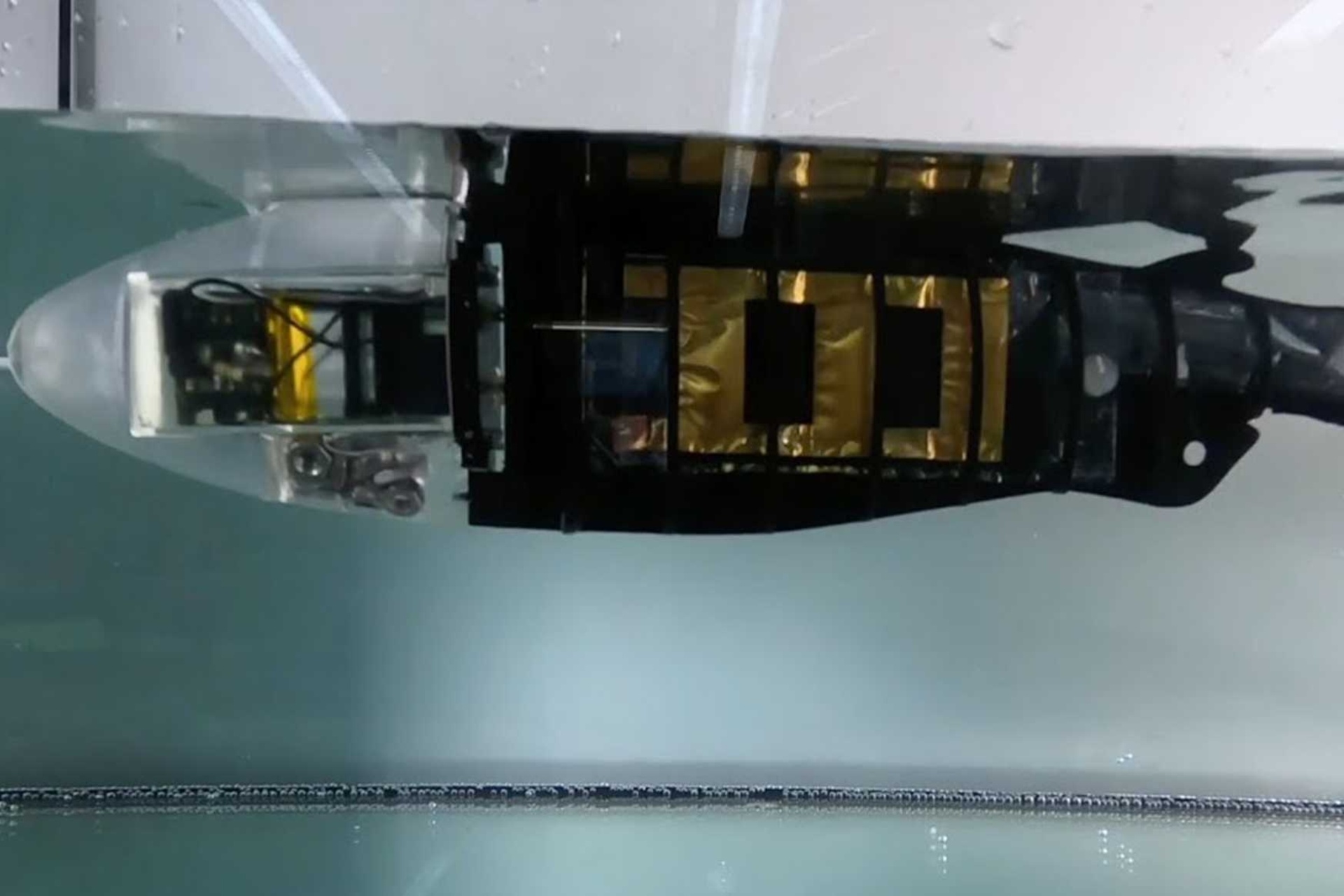
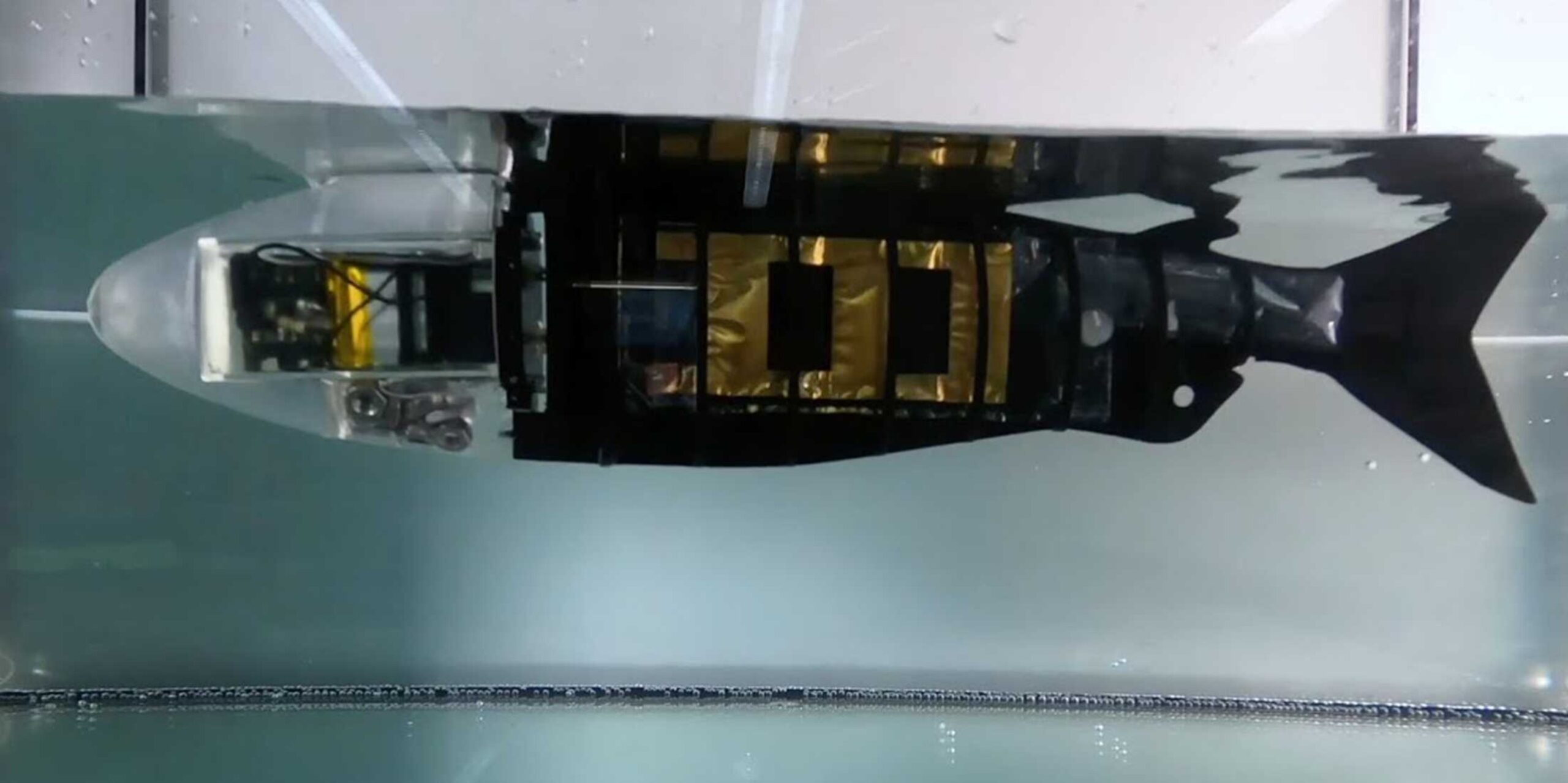
Երկրորդ առարկան ձկան նման լողորդ է՝ գրեթե 30 սանտիմետր երկարությամբ, որն ունակ է հեշտությամբ շարժվել ջրում։
Այն բաղկացած է «գլուխից», որը պարունակում է էլեկտրոնիկան և ճկուն «մարմին», որին կցված են «Հիդրավլիկ ուժեղացված ցածր լարման էլեկտրաստատիկ» մղիչները։
Այս ակտուատորները հերթափոխով շարժվում են այնպիսի ռիթմով, որն առաջացնում է տիպիկ լողի շարժում:
Ինքնավար ձուկը կարող է լճացման վիճակից վայրկյանում երեք սանտիմետր արագությամբ անցնել 14 վայրկյանում, և այս ամենը ընկղմվելով սովորական ծորակ ջրի մեջ:
Ռոբոտ շուն. շվեյցարական գյուտը ոգեշնչված կենդանիների կենսաբանությամբ
Շվեյցարիայում Դաշնային պոլիտեխնիկան թափանցիկ և հուսալի AI-ի համար

Նոր ակտուատորները շատ ավելի ամուր են, քան այլ արհեստական մկանները, ինչպես նաև անջրանցիկ
Այս երկրորդ օրինակը կարևոր է, քանի որ այն ցույց է տալիս HALVE ակտուատորների ևս մեկ նոր առանձնահատկություն:
Քանի որ էլեկտրոդներն այլևս պաշտպանված չեն պատյանից դուրս, արհեստական մկաններն այժմ անջրանցիկ են և կարող են օգտագործվել նույնիսկ հաղորդիչ հեղուկների մեջ ընկղմված վիճակում:
«Ձուկը ցույց է տալիս այս շարժիչների ընդհանուր առավելությունը. էլեկտրոդները պաշտպանված են արտաքին միջավայրից և հակառակը, շրջակա միջավայրը պաշտպանված է էլեկտրոդներով: Այսպիսով, դուք կարող եք օգտագործել այս էլեկտրաստատիկ ակտուատորները ջրի մեջ կամ դիպչել նրանց, օրինակ»:, ավելացնում է Ցյուրիխի Դաշնային տեխնոլոգիական ինստիտուտի պրոֆեսորը։
Ծրարների շերտավոր կառուցվածքը ևս մեկ առավելություն ունի. նոր ակտուատորները շատ ավելի ամուր են, քան այլ արհեստական մկանները:
Իդեալում, ծրարները պետք է կարողանան մեծ քանակությամբ շարժումներ կատարել և դա անել արագ:
Այնուամենայնիվ, նույնիսկ ամենափոքր արտադրական սխալը, ինչպիսին է էլեկտրոդների միջև փոշու մի մասնիկը, կարող է հանգեցնել էլեկտրական խափանումների, մի տեսակ «մինի կայծակի հարվածի»:
Նոյեմբերի 4-ին Լոզանում նշվում է «Շվեյցարական ռոբոտաշինության օրը»
DroneHub-ի հետ աննախադեպ… «թռչնանոց» անօդաչու թռչող սարքերի հետազոտության համար

«Մինի կայծակի» խնդիրները լուծված են, ընկերությունները պատրաստ են լայնածավալ արտադրության
«Երբ դա տեղի ունեցավ նախորդ մոդելներում, էլեկտրոդը այրվեց՝ պատի վրա անցք ստեղծելով: Սա թույլ տվեց հեղուկին դուրս գալ և մղիչն անօգտագործելի դարձրեց»:, բացատրում է Ստեֆան-Դանիել Գրավերտը։
Այս խնդիրը լուծվել է HALVE ակտուատորներում, քանի որ մեկ անցք էապես փակվում է ինքն իրեն՝ շնորհիվ պաշտպանիչ արտաքին պլաստիկ շերտի:
Արդյունքում, գործը մնում է լիովին ֆունկցիոնալ նույնիսկ էլեկտրական խափանումից հետո:
Երկու հետազոտողներն ակնհայտորեն ուրախ են, որ որոշիչ բեկում են կատարել արհեստական մկանների զարգացման գործում, բայց նրանք նաև իրատեսական են:
Ինչպես ասում է Ռոբերտ Կացշմանը. «Այժմ մենք պետք է պատրաստենք այս տեխնոլոգիան լայնածավալ արտադրության համար, և մենք չենք կարող դա անել այստեղ՝ ETH լաբորատորիայում: Չափազանց շատ բացահայտումներ չանելով՝ կարող եմ ասել, որ մենք արդեն հետաքրքրություն ենք գրանցում այն ընկերություններից, որոնք կցանկանան աշխատել մեզ հետ»։
Օրինակ՝ արհեստական մկանները մի օր կարող են օգտագործվել նոր ռոբոտների, պրոթեզավորման կամ կրելի սարքերի մեջ:
Այլ կերպ ասած, մարդու մարմնում և դրա վրա օգտագործման տեխնոլոգիաներում…
Սիլիկոնից պատրաստված ազնվամորու՝ ռոբոտներին քաղել հրահանգելու համար
Ճիշտ հարգանքի տուրք Լուգանոյից երիտասարդ Smilebots ռոբոտաշինության թիմին



Անկաշկանդ բռնիչ, որը շարժվում է HALVE ակտուատորներով, որը բռնում է PLA-ի բլոկը
Չկապված արհեստական ձուկ, որը վարում են HALVE շարժիչները, ծորակի ջրի մեջ
Ձեզ նույնպես կարող է հետաքրքրել.

Taam Ja'-ն աշխարհի ամենախոր «կապույտ փոսն» է՝ հայտնագործությունը
Յուկատան թերակղզու մոտ ծովային խոռոչը հայտնաբերվել է չորս անգամ ավելի խորը, քան նախորդ ռեկորդային խորտակումը Բելիզում

Բրազիլիայում առաջին հանդիպումն աշխարհում կենսաանվտանգության և սինքրոտրոնների միջև
Կամպինասում NB4 մակարդակի առավելագույն կենսաբանական պարունակության լաբորատորիան կմիացվի մասնիկների արագացուցիչի լույսի աղբյուրներին։

Այսօր Ալտո Ադիջում EDIH NOI-ն արհեստական ինտելեկտի նոր հղման կետն է
Բոլցանոյում PNRR հիմնադրամից 4,6 մլն եվրո կհատկացվի հետախուզության թվայնացման ոլորտում տեղական ընկերություններին մատուցվող ծառայությունների համար…
խմբագրության կողմից Innovando.NewsInnovando.News-ի խմբագրակազմ
Ավստրիան, Գերմանիան և Շվեյցարիան «ավելի նորարար» բեռնատար երկաթուղիների համար
DACH նախարարներ Լեոնորե Գևեսլերը, Ֆոլկեր Ուիսինգը և Ալբերտ Ռոստին. թվային ավտոմատ զուգավորման ներդրումը կարևոր տարր է
խմբագրության կողմից Innovando.NewsInnovando.News-ի խմբագրակազմ

 //
//